Week 2 Day 5
- Project Work: Sub-Systems, Bill of Materials
- STEAM Space: Open Lab
Project Work:
Sub-Systems
A key step in solving broad engineering problems, like building an invention from scratch, is to identify the sub-systems, or sub-problems, within your larger goal.
Today is about asking ourselves, what are the little things I need to get working, so that my final invention will function?
Your Deliverable for today is a Sub-system Map:
Identify the subsystems in your project, identify the primary problems or challenges with that subsystem, and who is responsable for making sure that problem is addressed.
Ususally your project will contain the following components, which can be thought of as broad sub-systems:
- Structural/Mechanical: The physical form of your project, along with mechanisms that allow for physical movement (Wheels, levers, enclosures).
- Electrical: The wiring and electronic components of your project (Power supply, connectors, sensors, actuators- which interface with mechanical sub-systems).
- Programming: The software logic of your project, that ensures that your invention processes information and responds appropriately.
All of these sub-systems have their own associated sub-problems, and they all need to integrate together in the final project form.
Most engineering groups break up these sub-systems amongst the team members, so that there is always at least one person responsible for ensuring that sub-system is on track. However, it is also critical to communicate between the sub-system specialists, so that everything fits together in the end.
Ex: Building a Smart Trashcan
Invention : Build a Trashcan that opens automatically for user and garbage man, locks at night, and drives to the curb on Trashday, when it is at least 1/2 full.
Team and Problem Structure:
- Mechanical Lead: Laurie
(Sub-Systems)
- Wheel Base + Motor: What size motor and wheels are needed?
- Trash Can: What shape of enclosure will accommodate all the sensors/batteries?
- Lid + Motor: What Servo is needed to open lid, what is its closing/locking mechanism?
- Electrical Lead: Taylor
(Sub-Systems)
- Battery + Charging Mechanism: How much power is needed to drive trashcan? How does it charge?
- Wiring: Where to run the wires, what types of information do you need to transfer?
- Motion Sensor: How to measure proximity?
- Weight Sensor: What size scale, is it waterproof?
- Programming Lead: Erin
(Sub-Systems)
- Time-Tracking: How are we measuring time?
- Weight Sensing: How do we know when trash can is half-full
- Navigation: How will trash can drive to curb? How will it know where it is?
The Mechanical Lead can build most of the physical mechanism independent of the other two team members, but Laurie needs to know how much space to leave for all the electrical components, and to know where to mount the motion sensor, scale, etc.
The Electrical Lead needs to coordinate with both the programmer and the mechanical lead to know where to run wires to and make sure that all the sensors are compatible with the intended run program.
The Programmer needs to know details about the physical structure, and the sensors, in order to write any functional code.
Bill of Materials (BOM)
Considering all these sub-systems, what does your sub-system need to be successful?
Ex. The Trash Can Team BOM
- Mechanical:
- 50 Gallon Trash Can
- 6” Caster Wheels * 4
- 12V Servo Motor for Lid
- 12 V DC Motor for Drive
- Electrical:
- 20ft of 18 Gauge Wire
- 4ft 16 Gauge Wire
- 3800maH 12V Battery
- Charging Station
- Ultrasonic Distance Sensor
- an RTC Clock Module
- 150lb Capacity Electric Scale
- Programming:
- Programming Libraries for: RTC, Ultrasonic Sensor.
- Programmer realizes that they’ll need a rotary encoder to know where the wheels are for their route-memorization script (need to let Electrical Lead know to get one).
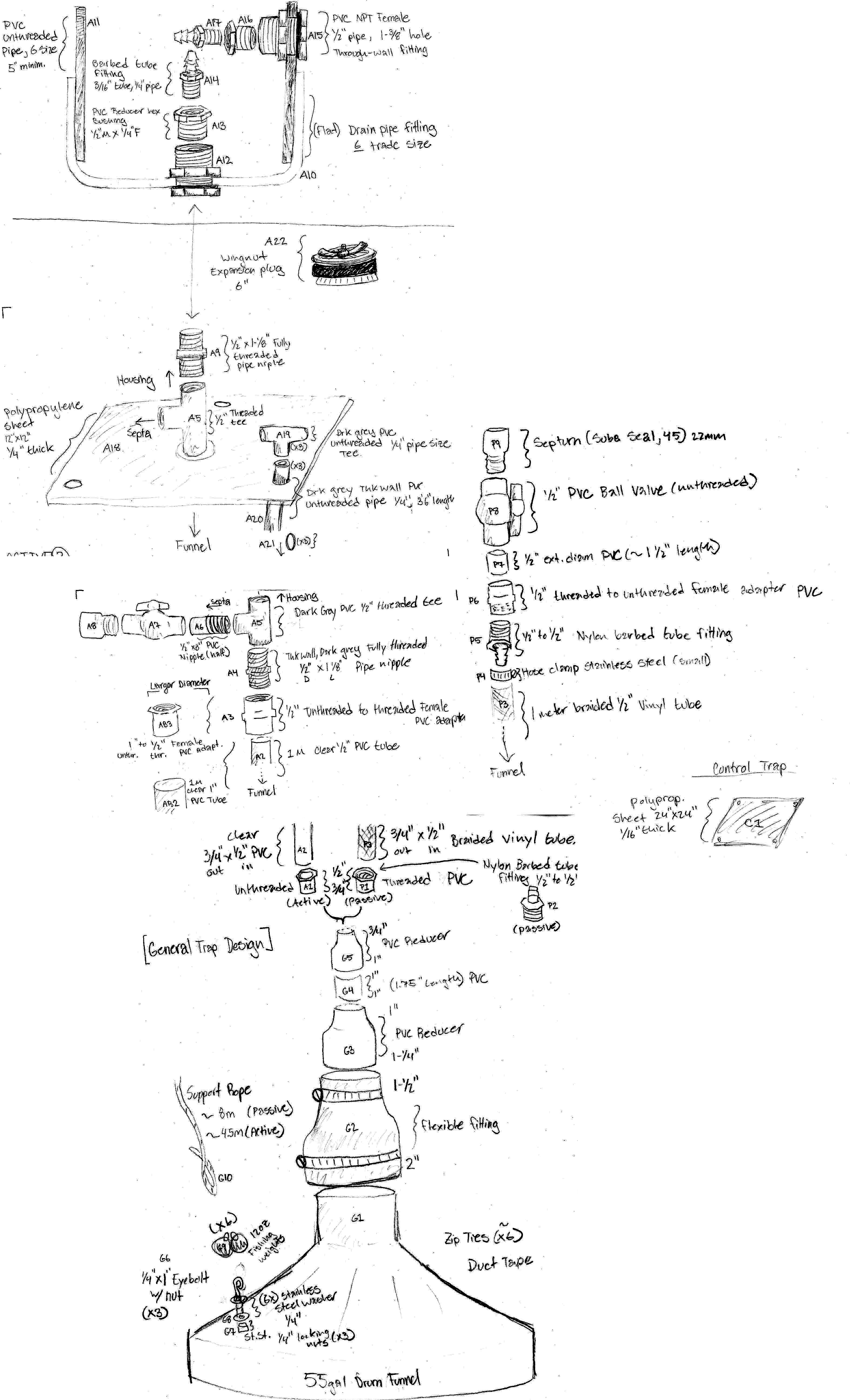
Detailed Schematics:
When you are working on a detailed problem, it is helpful to increase the detail and specificity of your design drawings. Now that we are identifying exactly what parts we are using in our BOM, we can reflect them in our drawings.